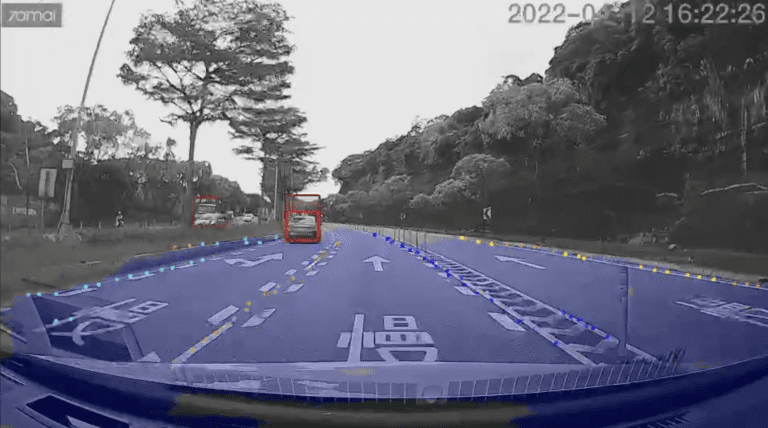
我们的IVA 系统,搭载的是影像为主的辨识系统,可提供车辆针对前方碰撞预防(包含汽车、机车与行人)、车道偏移、前车驶离提醒等功能,提供驾驶低速与高速情境时的行车辅助提醒。
能够为车辆前方的各种车辆提供防撞(包括机车和行人)、变换车道和车辆起步提醒等功能
可侦测前方涵盖52度的视野范围,包含辅助系统(LSS)、自动紧急刹车系统(AEB)
为了安全行驶而诞生,整合各式功能,是您的最佳守护者
本模组集成摄像头/辨识主机/LED警示开关/speaker于一体
当系统运作正常,指示灯为恒亮蓝灯;当系统异常,灯号则为恒亮黄灯
独家技术,夜晚侦测准度仍然高,日夜守护驾驶安全。
使用前置镜头感测器,来捕捉车道线的位置和周围的道路环境,帮助驾驶者保持车辆在行驶中的行驶车道内。
1.摄像头感测:系统通过摄像头感测器持续监测车辆前方的道路状况,包括车道线的位置和道路曲率。
2.车道偏离警告:当系统侦测到车辆即将偏离预定的行驶车道时,它会发出警告,透过视觉或听觉的方式提醒驾驶者。
3.辅助方向输入:如果驾驶者无法即时回应警告并进行方向调整,系统可以轻微地操控方向盘,以帮助车辆保持在正确的车道内。
※注意事项※
• 这个系统并不是全自动驾驶技术,而是一种辅助功能,旨在提升驾驶的安全性和舒适性。
• 驾驶者仍然需要保持对驾驶环境的观察和警觉,并随时准备接管控制。
• 如果驾驶者长时间不持续参与驾驶,系统可能会要求驾驶者重新握住方向盘或关闭辅助功能。
包含车道识别、车道模型估算、车辆与转向系统动态模型识别、车道跟随控制演算法以及主动转向控制等技术。
1.LFS镜头可撷取车辆前方车道画面,并透过影像辨识技术估算多项式方程式之车道数学模型,来计算车辆于车道之偏移资讯、摆角与车道曲率资讯作为控制系统输入资讯,以获得预期之LFS系统响应频宽与相位裕度(PM)之要求。
2.最终LFS控制器会依车辆与车道之相关资讯决定方向盘之转向修正角度,并控制电动辅助转向系统EPS(Electric Power Steering),以维持车辆行驶于车道内。
3.车辆中心已整合车道跟随系统系统所需之关键技术,并实际搭载于实车完成功能与性能实测。
能够自动侦测前方的障碍物、车辆和行人等潜在的碰撞危险,并自动启动紧急煞车,以帮助驾驶者避免事故或减少碰撞的影响。
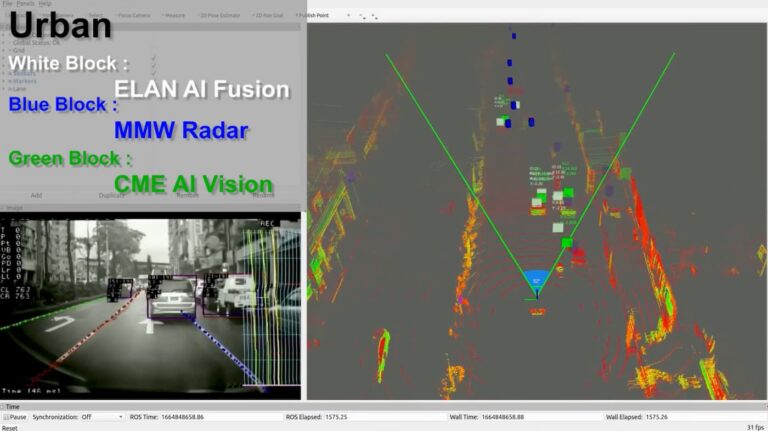
1.感测器技术: 该系统使用雷达、摄像头或其他感测器来识别前方的障碍物,并根据收集到的数据评估碰撞风险。
2.自动干预: 当系统确定存在碰撞的风险并且驾驶者未能采取行动时,AEB会自动触发紧急制动,以帮助避免碰撞。
3.降低事故风险: AEB有助于减少低速碰撞,特别是在城市道路上,也可以减少行人和车辆之间的碰撞风险。
4.提升安全性: 该技术有助于提升驾驶者和乘客的整体安全性,减少事故造成的伤害。
※注意事项: AEB是一种辅助功能,它不代表完全自动驾驶,驾驶者仍需保持警觉并参与驾驶过程。
能够通过镜头感测器来识别前方车辆、分析速度和运动,用来维持车道、识别车辆类型和行人等,以实现更精确的车距控制和自动速度调整。并有助于提高驾驶的安全性和舒适性。
1.前方车辆识别: ACC系统可以使用镜头感测器辨识前方道路上的车辆。包括辨识车辆的大小、形状、车种和位置,以及计算与前车的距离。
2.速度和运动分析: 透过镜头捕捉的影像,ACC系统可以分析前方车辆的运动模式和速度变化。这有助于系统预测前方车辆的行为,并依此调整车辆的速度。
3.车道保持: ACC系统可使用镜头来辨识车道线的位置,从而帮助车道维持辅助系统(Lane Keeping Assist)的判定,让车辆保持在正确的行驶车道内。
4.行人识别: 高级的ACC系统甚至可以使用影像技术来识别行人,以进一步增加行人的安全性。
5.安全警告和制动: 如果镜头感测到前方车辆减速或停止,ACC系统可以发出警告,并在必要时自动启动紧急煞车,以避免碰撞。
一般机车、重型机车
一般轿车、小型车
如公车、货卡等中型车辆
包含各式大型运输车辆
包含堆高机、怪手、工程机具等
按照您的需求,量身打造
机种型号
IVA Level2
工作电压
9V ~ 36V
工作温度
-30℃~75℃
工作电流
Under 0.5A@24V
输出影像
CVBS or AHD
解析度
1280*720
动态范围
115dB
影像感测器尺寸
1/2.7 inch
视野范围(水平)
52゜